Control de MOTORES DC con Arduino y el chip L293D
Encoder ¿como funciona? y sus tipos
¿Qué es un encoder?
El encoder es un transductor rotativo, que mediante una señal eléctrica sirve para indicar la posición angular de un eje, velocidad y aceleración del rotor de un motor.
¿Como funciona un encoder?
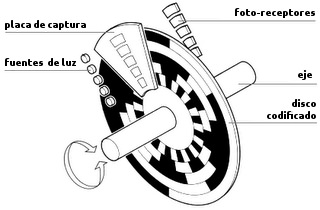
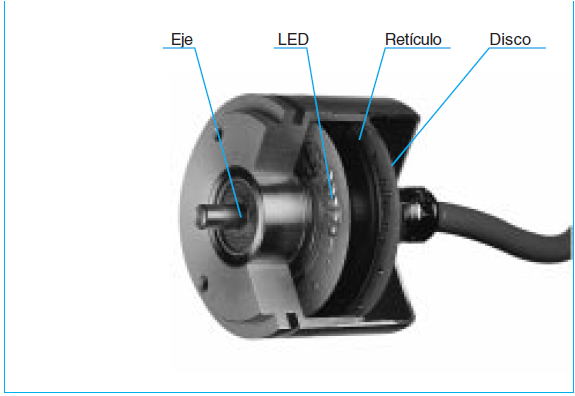
Un encoder se compone básicamente de un disco conectado a un eje giratorio. El disco esta hecho de vidrio o plástico y se encuentra “codificado” con unas partes transparentes y otras opacas que bloquean el paso de la luz emitida por la fuente de luz (típicamente emisores infrarrojos). En la mayoría de los casos, estas áreas bloqueadas (codificadas) están arregladas en forma radial.
A medida que el eje rota, el emisor infrarojo emite luz que es recibida por el sensor óptico (o foto-transistor) generando los pulsos digitales a medida que la luz cruza a través del disco o es bloqueada en diferentes secciones de este. Esto produce una secuencia que puede ser usada para controlar el radio de giro, la dirección del movimiento e incluso la velocidad.
Tipos de encoder
Una clasificación de los encoder según el tipo de información sobre la posición que generan sería:
Incremental
Como su nombre lo indica, es un encoder que determina el ángulo de posición por medio de realizar cuentas incrementales.
Esto quiere decir que el encoder incremental provee una posición estratégica desde donde siempre comenzará la cuenta. La posición actual del encoder es incremental cuando es comparada con la ultima posición registrada por el sensor.
Los encoders incrementales son un tipo de encoder óptico y este en este tipo de encoder cada posición es completamente única. Dentro de los encoders incrementales, se encuentran los
Encoders de cuadratura
Corresponde a un tipo de encoder incremental que utiliza dos sensores ópticos posicionados con un desplazamiento de 1⁄4 de ranura el uno del otro, generando dos señales de pulsos digitales desfasada en 90º o en cuadratura. A estas señales de salida, se les llama comúnmente A y B. Mediante ellas es posible suministrar los datos de posición, velocidad y dirección de rotación del eje. Si se incluye la señal de referencia, se le denomina I (índice).
Usualmente, si la señal A adelanta a la señal B (la señal A toma valor lógico “1” antes que la señal B, por ejemplo), se establece el convenio de que el eje está rotando en sentido horario, mientras que si B adelanta a A, el sentido será antihorario.
Absoluto
Se basa en la información proveída para determinar la posición absoluta en secuencia. Un encoder absoluto ofrece un cogido único para cada posición.
Se dividen en dos grupos: los encoders de un solo giro y los encoders absolutos de giro múltiple y su tamaño es pequeño para permitir una integración mas simple.
Monovuelta
Dividen una revolución mecánica en un número determinado de pasos de medición. Tras una revolución completa, los valores de medición se repiten. El número máximo de pasos es de 8.192.
Multivuelta
No sólo registran la posición angular, sino que también cuentan las revoluciones (hasta un máximo de 4.096). La emisión de las señales se efectúa ya sea a través de una interfaz SSI o de un sistema de bus tipo CAN o Profibus.


0 comentarios:
Publicar un comentario